...
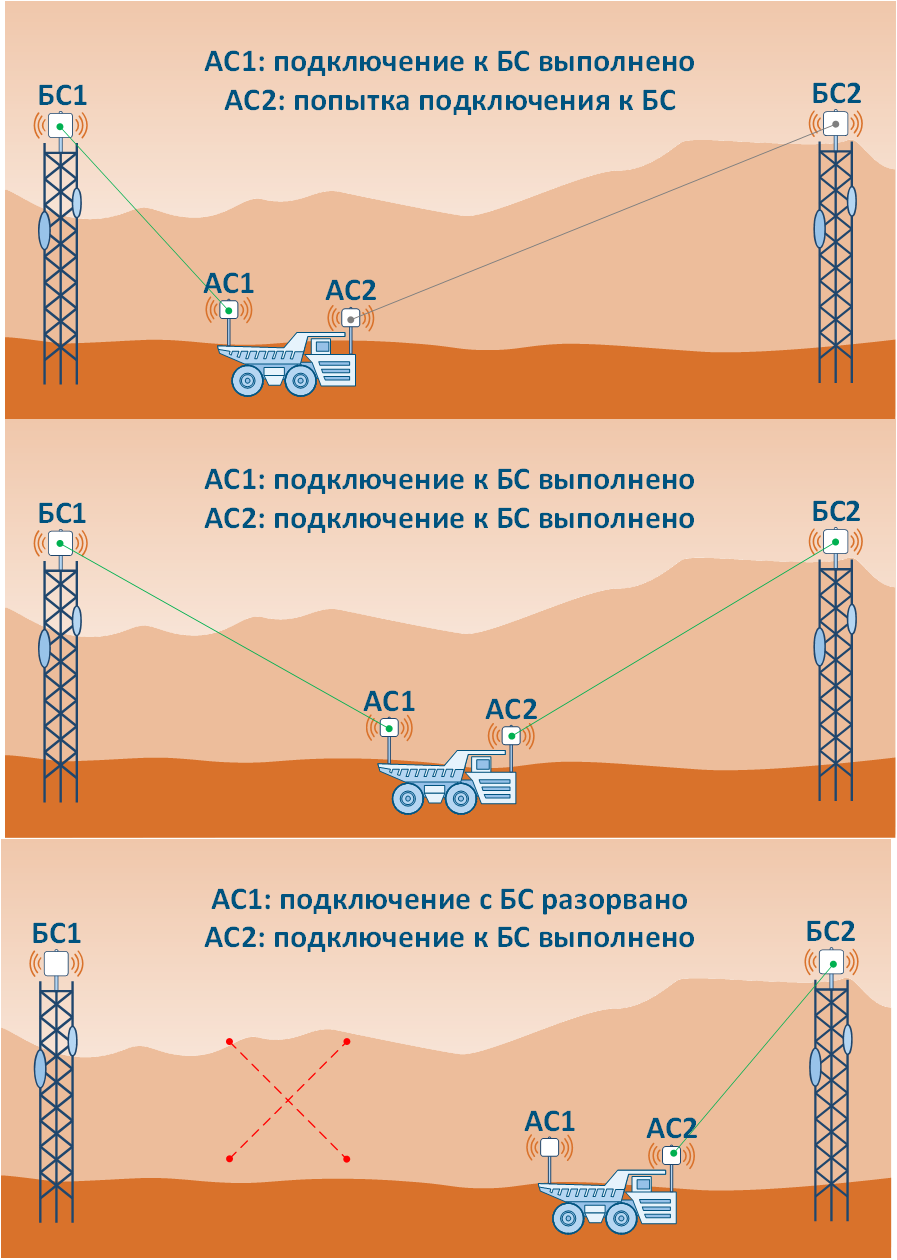
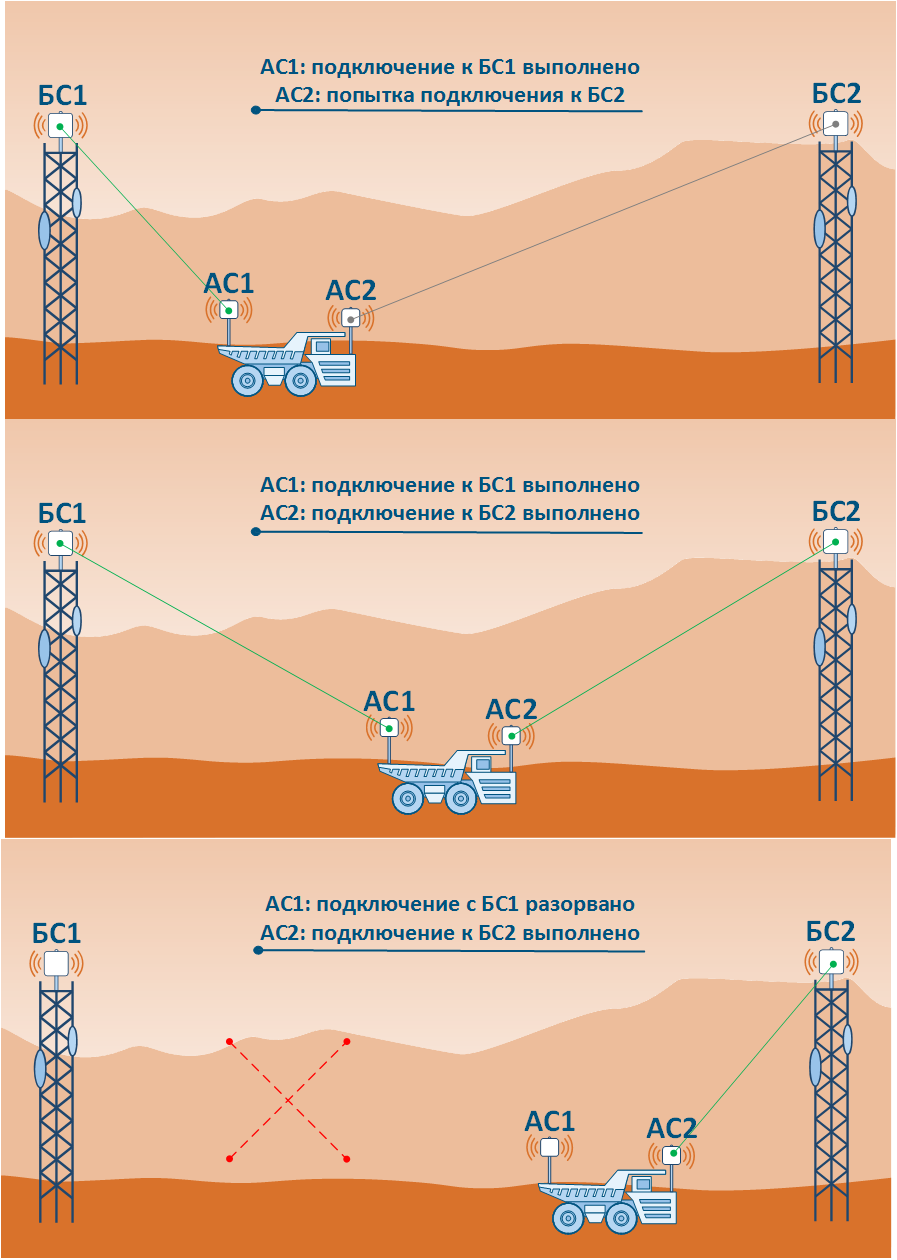
Поясним алгоритм роуминга в схеме с двумя АС (см. рисунок 98):
- АС1 и АС2 установили радиоканал с БС1. При этом не возникает петли, т.к. все радиоустройства объединены в одну область MINT и устройства используют таблицу пересылки перенаправления кадров, учитывающую параметр стоимости.
- Объект Автомобиль движется, АС2 разрывает канал связи с БС1. АС1 сохраняет связь с БС1. Перерыва сервиса не наблюдается, т.к. для обмен обмена данными между подвижным объектом автомобилем и центром управления осуществляется через канал АС2АС1-БС1.
- АС2 начинает поиск БС для установления радиоканала. АС1 сохраняет связь канал связи с БС1.
- АС2 устанавливает связь с БС2. АС1 сохраняет связь с БС1. При передаче данных InfiMUX использует один из двух каналов связи АС1-БС1 и АС2-БС2, с меньшей метрикой.
- Объект Автомобиль движется и АС1 разрывает связь с БС1. АС2 сохраняет связь с БС2. Передача данных будет выполнена через канал АС2-БС2, перерыва сервиса не наблюдается.
| Center |
|---|
Рисунок 9 8 - Роуминг в схеме с двумя АС на подвижном объекте (Можно сделать видео) |
Настройка устройств заключается в том, что на устройствах АС1 и АС2 должны быть созданы PRF-интерфейсы в сторону InfiMUX, а на InfiMUX - PRF-интерфейсы в сторону беспроводных устройств. Кроме того, настройка групп коммутации должна быть перенесена из конфигурации АС в конфигурации InfiMUX.
Следует иметь в виду, что после любых изменений в конфигурации устройств, выполненных из командной строки, следует сохранить обновлённые настройки. Команда сохранения конфигурации
...